Visualization of Neighborhoods Tutorial¶
Objective: This tutorial covers how to perform visualize neighborhoods based on two approaches.
1) Grabbing a bounding box region a vertex
2) Grabbing n neighbors around a vertex
[1]:
from brainlit.utils.Neuron_trace import NeuronTrace
from brainlit.utils.session import NeuroglancerSession
import numpy as np
from cloudvolume import CloudVolume
import napari
from napari.utils import nbscreenshot
%gui qt5
Reading data from s3 path
[3]:
"""
s3_path = "s3://open-neurodata/brainlit/brain1_segments"
seg_id, v_id, mip = 2, 10, 1 # skeleton/neuron id, index/row of df, resolution quality
s3_trace = NeuronTrace(path=s3_path,seg_id=seg_id,mip=mip)
df = s3_trace.get_df()
df.head()
"""
Downloading: 100%|██████████| 1/1 [00:00<00:00, 8.06it/s]
Downloading: 100%|██████████| 1/1 [00:00<00:00, 9.13it/s]
[3]:
| sample | structure | x | y | z | r | parent | |
|---|---|---|---|---|---|---|---|
| 0 | 1 | 0 | 4717.0 | 4464.0 | 3855.0 | 1.0 | -1 |
| 1 | 4 | 192 | 4725.0 | 4439.0 | 3848.0 | 1.0 | 1 |
| 2 | 7 | 64 | 4727.0 | 4440.0 | 3849.0 | 1.0 | 4 |
| 3 | 8 | 0 | 4732.0 | 4442.0 | 3850.0 | 1.0 | 7 |
| 4 | 14 | 0 | 4749.0 | 4439.0 | 3856.0 | 1.0 | 8 |
Converting dataframe to graph data structure to understand how vertices are connected
[4]:
# G = s3_trace.get_graph()
# paths = s3_trace.get_paths()
# print(f"The graph was decomposed into {len(paths)} paths")
The graph was decomposed into 179 paths
Plotting the entire skeleton/neuron
[5]:
# viewer = napari.Viewer(ndisplay=3)
# # it is important that the number of paths put into 'data=' is at the most 1024
# viewer.add_points(data=np.concatenate(paths)[804:], edge_width=2, edge_color='white', name='Skeleton 2')
# viewer.add_shapes(data=paths, shape_type='path', edge_color='white', name='Skeleton 2')
# nbscreenshot(viewer)
[5]:
Bounding Box Method¶
Creating a bounding box based on a particular vertex of interest in order to get a group of neurons neighboring the vertex of interest
[6]:
# url = "s3://open-neurodata/brainlit/brain1"
# mip = 1
# ngl = NeuroglancerSession(url, mip=mip)
# img, bbbox, vox = ngl.pull_chunk(2, 300, 1)
# bbox = bbbox.to_list()
# box = (bbox[:3], bbox[3:])
# print(box)
Downloading: 100%|██████████| 1/1 [00:00<00:00, 3.20it/s]
Downloading: 52it [00:02, 21.56it/s]([7392, 2300, 3120], [7788, 2600, 3276])
Getting all the coordinates of the group surrounding the vertex of interest using get_sub_neuron()
Note: data correction step necessary due to recentering in function!
[7]:
# G_sub = s3_trace.get_sub_neuron(box)
# # preventing the re-centring of nodes to the bounding box corner (origin of the new coordinate frame)
# for id in list(G_sub.nodes):
# G_sub.nodes[id]["x"] = G_sub.nodes[id]["x"] + box[0][0]
# G_sub.nodes[id]["y"] = G_sub.nodes[id]["y"] + box[0][1]
# G_sub.nodes[id]["z"] = G_sub.nodes[id]["z"] + box[0][2]
# paths_sub = s3_trace.get_sub_neuron_paths(box)
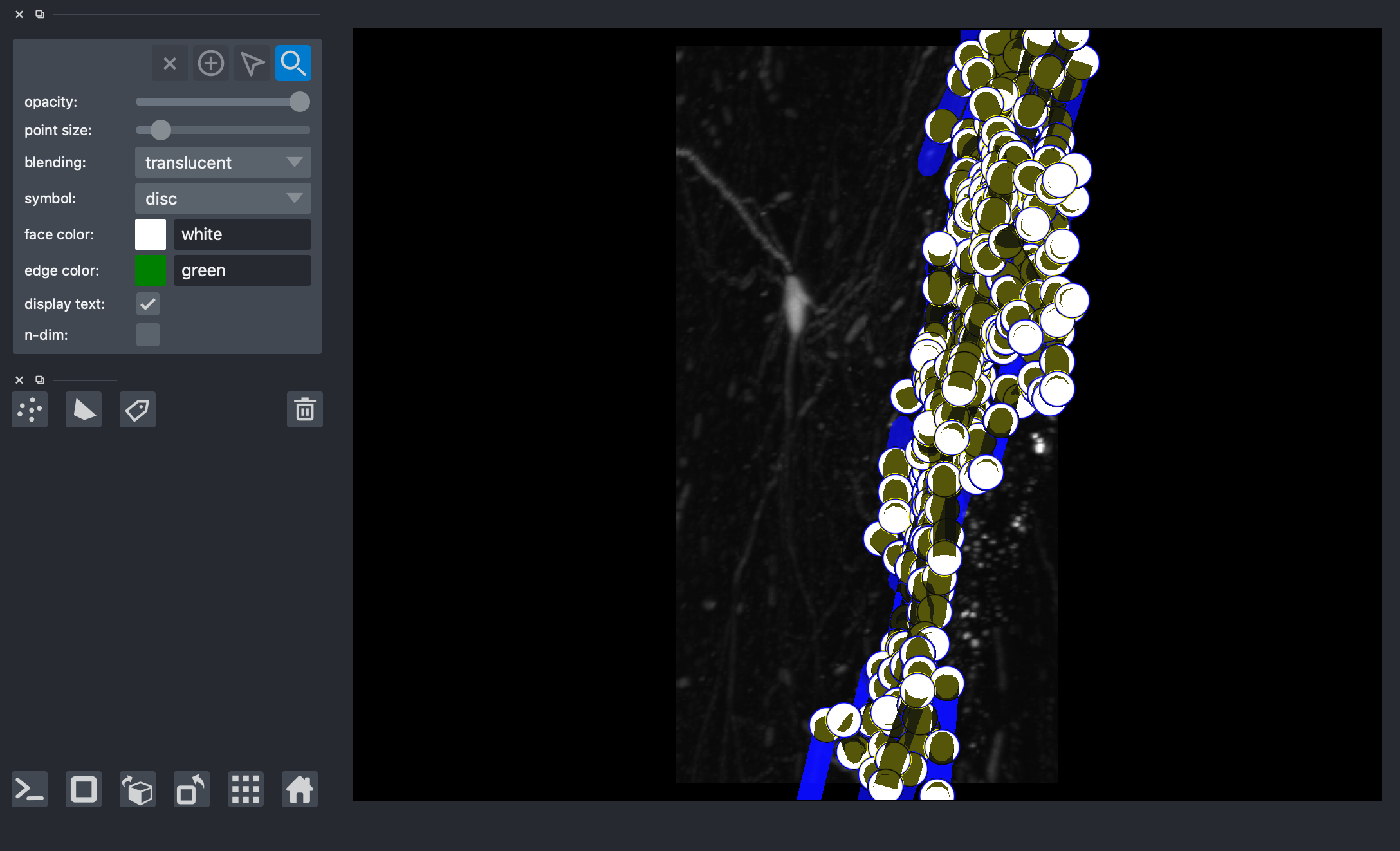
Plotting vertex and vertex neighborhood
[11]:
# # grab the coordinates of the vertex from the skeleon
# cv_skel = CloudVolume(s3_path, mip=mip, use_https=True)
# skel = cv_skel.skeleton.get(seg_id)
# vertex = skel.vertices[v_id]/cv_skel.scales[mip]["resolution"]
# print(vertex)
# viewer = napari.Viewer(ndisplay=3)
# viewer.add_image(np.squeeze(np.array(img)))
# viewer.add_points(data=np.concatenate(paths_sub), edge_width=1, edge_color='blue', name='Skeleton 2')
# viewer.add_shapes(data=paths_sub, shape_type='path', edge_color='blue', name='Neighborhood',edge_width=5)
# # display vertex
# viewer.add_points(data=np.array(vertex), edge_width=2, edge_color='green', name='vertex')
# nbscreenshot(viewer)
Downloading: 100%|██████████| 1/1 [00:00<00:00, 7.97it/s]
[6263.70139759 6573.55819874 2210.2198857 ]
[11]:
Neighbors Method¶
[12]:
# # grab the coordinates of the vertex from the skeleon
# cv_skel = CloudVolume(s3_path, mip=mip, use_https=True)
# skel = cv_skel.skeleton.get(seg_id)
# vertex = skel.vertices[v_id]/cv_skel.scales[mip]["resolution"]
# print(vertex)
# # figure out where the vertex information is stored in the dataframe
# x, y, z = np.round((vertex))[0], np.round((vertex))[1], np.round((vertex))[2]
# slice_df = (df[(df.x == x)&(df.y==y)&(df.z==z)])
# v_idx = np.where((df.x == x)&(df.y==y)&(df.z==z))
# v_idx = v_idx[0][0]
# print(v_idx)
# slice_df.head()
Downloading: 100%|██████████| 1/1 [00:00<00:00, 7.64it/s][6263.70139759 6573.55819874 2210.2198857 ]
469
[12]:
| sample | structure | x | y | z | r | parent | |
|---|---|---|---|---|---|---|---|
| 469 | 434 | 0 | 6264.0 | 6574.0 | 2210.0 | 1.0 | 431 |
On another napari window, plot again the entire neuron/skeleton.
[13]:
# viewer = napari.Viewer(ndisplay=3)
# viewer.add_points(data=np.concatenate(paths, axis=0)[1024:], edge_width=2, edge_color='white', name='all_points')
# viewer.add_shapes(data=paths, shape_type='path', edge_color='white', edge_width=3, name='skeleton')
# nbscreenshot(viewer)
[13]:
Get the coordinates of the neighobrs around vertex of interest using get_bfs_subgraph() and graphs_to_paths
[14]:
# v_id_pos = v_idx # the row index/number of the data frame
# depth = 10 # the depth up to which the graph must be constructed
# G_bfs, _, paths_bfs =s3_trace.get_bfs_subgraph(int(v_id_pos), depth, df=df) # perform Breadth first search to obtain a graph of interest
Plot the vertex and vertex neighborhood
[22]:
# x,y,z = df.iloc[v_id_pos]['x'], df.iloc[v_id_pos]['y'], df.iloc[v_id_pos]['z']
# # display vertex
# viewer = napari.Viewer(ndisplay=3)
# viewer.add_points(data=np.array([x,y,z]), edge_width=5, edge_color='orange', name='bfs_vertex')
# # display all neighbors around vertex
# viewer.add_points(data=np.concatenate(paths_bfs), edge_color='red', edge_width=2, name='bfs_points')
# viewer.add_shapes(data=paths_bfs, shape_type='path', edge_color='red', edge_width=3, name='bfs_sub_skeleton')
# nbscreenshot(viewer)
[22]:
Visualizing the output of both methods overlaid¶
Create new napari window
[21]:
# viewer = napari.Viewer(ndisplay=3)
# viewer.add_points(data=np.concatenate(paths, axis=0)[1024:], edge_width=2, edge_color='white', name='all_points')
# viewer.add_shapes(data=paths, shape_type='path', edge_color='white', edge_width=3, name='full_skeleton')
# nbscreenshot(viewer)
[21]:
Plot vertices and neighborhoods of each method on the same napari window to compare method outputs
[23]:
# # display vertex of the boundary method
# viewer.add_points(data=np.array(vertex), edge_width=5, edge_color='green', name='boundary_vertex')
# # display all neighbors around vertex of boundary method
# viewer.add_points(data=np.concatenate(paths_sub), edge_width=2, edge_color='blue', name='boundary_skeleton_pts')
# viewer.add_shapes(data=paths_sub, shape_type='path', edge_color='blue', name='boundary_skeleton_lines',edge_width=5)
# # display vertex of the bfs method
# x,y,z = df.iloc[v_id_pos]['x'], df.iloc[v_id_pos]['y'], df.iloc[v_id_pos]['z']
# viewer.add_points(data=np.array([x,y,z]), edge_width=5, edge_color='orange', name='bfs_vertex')
# # display all neighbors around vertex of bfs method
# viewer.add_points(data=np.concatenate(paths_bfs), edge_color='red', edge_width=2, name='bfs_skeleton_pts')
# viewer.add_shapes(data=paths_bfs, shape_type='path', edge_color='red', edge_width=3, name='bfs_skeleton_lines')
# nbscreenshot(viewer)
[23]:
[ ]: